#include <MultibeamBackEnd.h>
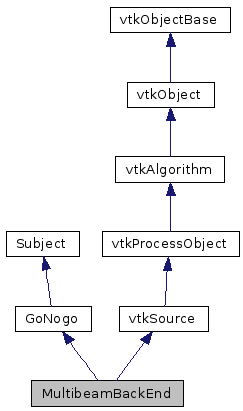
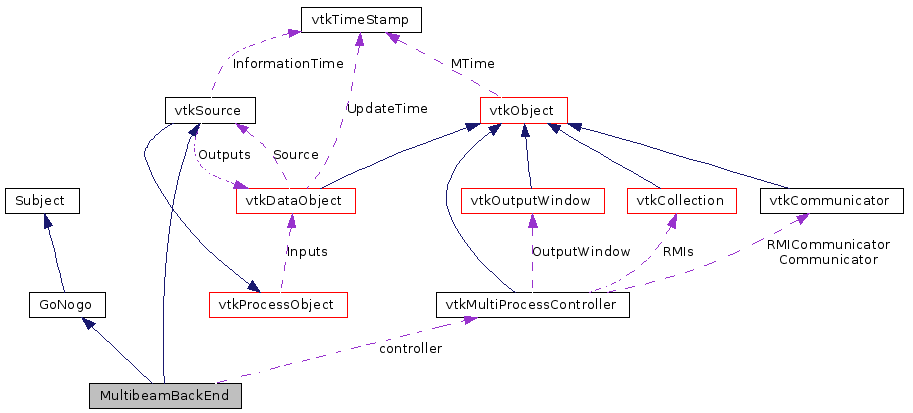
Inheritance diagram for MultibeamBackEnd:
Public Member Functions | |
| vtkTypeMacro (MultibeamBackEnd, vtkSource) | |
| void | PrintSelf (ostream &os, vtkIndent indent) |
| Print the internal state. | |
| void | Process (vtkMultiProcessController *controller, int frontend_pid) |
| Specify the Process (if any) that runs this Instrument. | |
| vtkMultiProcessController * | Process () const |
| Give the Process (if any) that runs this Instrument. | |
Static Public Member Functions | |
| static MultibeamBackEnd * | New () |
| Construct a new object of this class. | |
Protected Member Functions | |
| MultibeamBackEnd () | |
| Ctor. | |
| ~MultibeamBackEnd () | |
| Dtor. | |
| virtual void | Execute () |
| Execute the dataflow. | |
| SMARTP (ssPolyDatatoBathymetryScrollFilter) bathyFilter | |
| The bathymetry filter. | |
| SMARTP (ssPolyDatatoAttitudeScrollFilter) attitudeFilter | |
| The attitude filter. | |
| SMARTP (ssPolyDatatoPlanStaticFilter) planFilter | |
| The plan filter. | |
| SMARTP (vtkInputPort) bathyInput | |
| The bathymetry input. | |
| SMARTP (vtkInputPort) attitudeInput | |
| The attitude input. | |
| SMARTP (vtkInputPort) planInput | |
| The plan input. | |
Protected Attributes | |
| vtkMultiProcessController * | controller |
| The process controller. | |
| int | frontend_pid |
| The "front end" PID. | |
In addition this class will implement the recording of the data in internal format for later processing.
Definition at line 30 of file MultibeamBackEnd.h.
| MultibeamBackEnd::MultibeamBackEnd | ( | ) | [protected] |
Ctor.
| MultibeamBackEnd::~MultibeamBackEnd | ( | ) | [protected] |
Dtor.
| static MultibeamBackEnd* MultibeamBackEnd::New | ( | ) | [static] |
Construct a new object of this class.
This is the only method that objects of this class may be brought into existance.
Reimplemented from vtkAlgorithm.
| MultibeamBackEnd::vtkTypeMacro | ( | MultibeamBackEnd | , | |
| vtkSource | ||||
| ) |
| void MultibeamBackEnd::PrintSelf | ( | ostream & | os, | |
| vtkIndent | indent | |||
| ) | [virtual] |
Print the internal state.
| os | The destination stream. | |
| indent | The indentation to use. |
Reimplemented from vtkSource.
| void MultibeamBackEnd::Process | ( | vtkMultiProcessController * | controller, | |
| int | frontend_pid | |||
| ) |
Specify the Process (if any) that runs this Instrument.
| controller | The process controller. | |
| frontend_pid | The PID of the front end (instrument) process. |
| vtkMultiProcessController* MultibeamBackEnd::Process | ( | ) | const |
Give the Process (if any) that runs this Instrument.
| virtual void MultibeamBackEnd::Execute | ( | ) | [protected, virtual] |
| MultibeamBackEnd::SMARTP | ( | ssPolyDatatoBathymetryScrollFilter | ) | [protected] |
The bathymetry filter.
| MultibeamBackEnd::SMARTP | ( | ssPolyDatatoAttitudeScrollFilter | ) | [protected] |
The attitude filter.
| MultibeamBackEnd::SMARTP | ( | ssPolyDatatoPlanStaticFilter | ) | [protected] |
The plan filter.
| MultibeamBackEnd::SMARTP | ( | vtkInputPort | ) | [protected] |
The bathymetry input.
| MultibeamBackEnd::SMARTP | ( | vtkInputPort | ) | [protected] |
The attitude input.
| MultibeamBackEnd::SMARTP | ( | vtkInputPort | ) | [protected] |
The plan input.
vtkMultiProcessController* MultibeamBackEnd::controller [protected] |
int MultibeamBackEnd::frontend_pid [protected] |
